

1. Mech Warfare – The embodiment of Mech to Mech combat.
2. Role Warfare – The ability for player’s to customize their experience to suit their own style of gameplay.
3. Community Warfare – The ability to let the players take part in epic combat for territorial control.
4. Information Warfare – Bring a new element to the battlefield that incorporates information technology to help control the fight.
Out of those 4 core pillars, PGI has effectively delivered the very first, which is Mech Warfare i.e. we have mechs to fight with. PGI is about to deliver another one this year, which is the Community Warfare, big thing. What if I told you that 2 additional pillars can be delivered with very small additions (insert Morpheus meme here), Information Warfare and Role Warfare?
This plan revolves around a very simple core idea. Tinkering with the range when your mech becomes detectable for the enemy and when you can detect enemy mechs. Currently, this range is 800 m by default for both ways. Adjusting this number will make lights less detectable while making them detect enemies at longer ranges, which fullfills their purpose as scouts. This proposal is compatible with how ECM and BAP currently works although modifying their roles further allows true information warfare. Thus, implementing this makes a solid ground onto which build further details and clan information warfare. Table 1 lists proposed scanning and detection ranges.
Another aspect of the proposal is ACTIVE and PASSIVE radar modes. These are separate from ECM disrupt/counter modes and present in all mechs. By switching your mech into a passive scanning mode decreases the sensor profile at the expense of scanning range. Heavier mechs are easier to detect at longer ranges but even they can try to hide with this mode. Giving mechwarriors control over their sensor profile will relieve LRM complaits, because in addition to the usual "L2UseCover", people can actually try to do something actively themselves to avoid LRM-horror. Giving mechwarriors an active way to discourage LRM storms will simultaneously make LRMs open for possible boosts to make them truly viable in competitive matches, because LRM-balance in general has to less go according to the lowest common nominator.

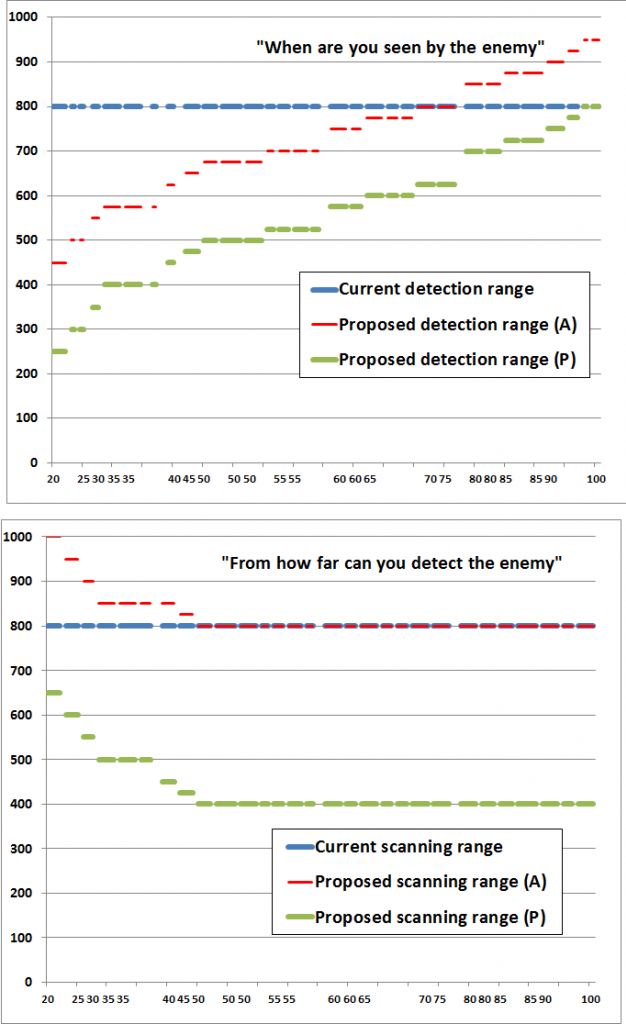
For example, a locust is running in active mode with 1000 m scanning range and the risk of detection starts at 450 m. If it switches to passive radar mode, it is visible only at 250 m, while still being able to scan up to 650 meters. In contrast, highlander in active mode scans enemies up to 800 m (like now) but is scannable himself to 900 m due to size. Switching to passive radar will cut his own sensors in half and he can only see up to 400 m while he remains visible to the enemy up to 750 m. In this manner, Information Warfare also delivers Role Warfare, because locust is now a useful scout, which is not easily detected.
How are then situation resolved, where an enemy mech is already inside your scanning range but would not basically be visible yet due to its lower sensor image? For example, I'm walking in my atlas with 800 m detection range and I see a Blackjack at 700 m, which is outside BJ's own 650 m sensor image. Here, until I reach 650 m, I should be able to detect the BJ halfway to 725 m (between 650 m and 800 m) but the sensor signal should be breaking and sporadic a bit like during ECM disruption but not so bad. If the BJ pilot swithes to passive radar mode, his sensor image drops to 475 m and he becomes invisible to me and I can only see him starting at (800-475)/2=638 m. On the other hand, he can see me lumbering just fine.
In these figures, you can see how scanning range and detection range change with tonnage in active (A) and passive (P) modes:
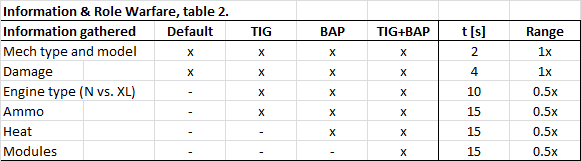
Finally, to give BAP the properties it deserves, BAP and Target Info Gathering (TIG) module should have the effects listed in Table 2. They should allow the scouting of vital information from the enemy mech but this takes time and should not happen at max range:
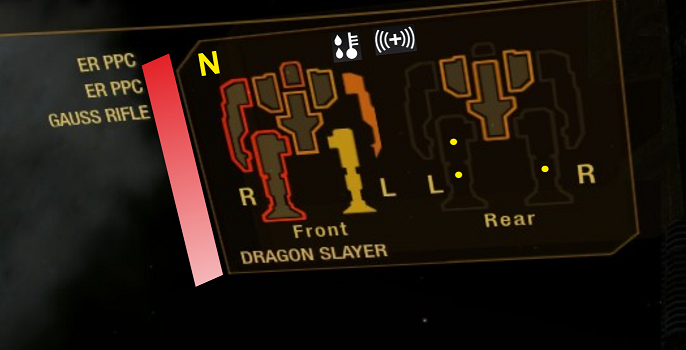
To show how this information can easily be shown, I made a quick mockup. Yellow dots are ammo:
EDIT: fixed image, typos, added a paragraph to explain what happens when mech inside your detection range has a lower sensor image than your range (meet halfway).
Edited by Rasc4l, 03 June 2014 - 09:11 AM.



























