A little off topic, but related to Mechs.
Pros and Cons between Human joint legs and Chicken joint legs?
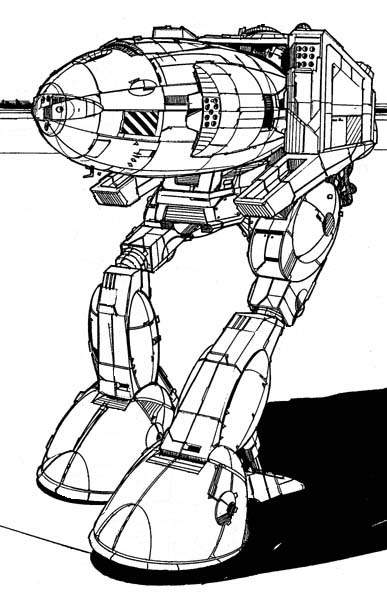
Basically, Catapult legs vs Atlas legs.

Leg Joints
Started by Shiroi Tsuki, Jan 01 2015 08:27 AM
21 replies to this topic
#1
-
-

- FP Veteran - Beta 1

- 1,205 posts
Member
- LocationCosplaying Ruby from Rwby in Aiur, Auckland, GA America, Interior Union, Mar Sara and Remnant
Posted 01 January 2015 - 08:27 AM
#2
-

-
- The Sureshot

- 10,282 posts
Member
- LocationNAIS College of Military Science OCS courses
Posted 01 January 2015 - 08:29 AM
Well a humanoid type leg should be better at weight, yet a reverse joint should be able to run faster.
#3
-
-

- 373 posts
Member
Posted 01 January 2015 - 10:48 AM
Bird legs look super cool and awesome and rad, while human legs look silly and rubbish and smell of poo?
#4
-

-
- Ace Of Spades

- 26,888 posts
Member
- LocationThe Keeper of Memes
Posted 01 January 2015 - 10:49 AM
Most of the time, humanoid body mechs tend to have better hitboxes. There are of course exceptions like the Stalker, Doomcrow and Timbergod.
#5
-

-
- The Bold
- 143 posts
Member

Posted 01 January 2015 - 12:03 PM
Chicken-walkers seem to have higher "foot lift". they seem to hill climb better.
#6
-

-
- The Ominous

- 6,273 posts
Member
Posted 01 January 2015 - 12:07 PM
For stability, human legs are terrible. chicken legs as you refer to them could absorb the shock of firing a gun much better.
You can also get lower to the ground easier.
Though humanoid legs are much easier to build effectively and are far less complex.
You can also get lower to the ground easier.
Though humanoid legs are much easier to build effectively and are far less complex.
#7
-
-
- FP Veteran - Beta 1
- 1,205 posts
Member
- LocationCosplaying Ruby from Rwby in Aiur, Auckland, GA America, Interior Union, Mar Sara and Remnant
Posted 01 January 2015 - 06:37 PM
 Senor Cataclysmo, on 01 January 2015 - 10:48 AM, said:
Senor Cataclysmo, on 01 January 2015 - 10:48 AM, said:
Bird legs look super cool and awesome and rad, while human legs look silly and rubbish and smell of poo?
Totally agree.....
Thank you all
#8
-
-
- 2,184 posts
Member

Posted 01 January 2015 - 06:55 PM
Don't diss human legs. We evolved into a rather impressive long distance runner, which is how our ancestors hunted (and how some humans still hunt today). We'd literally run our prey to death. They'd outrun us over the short haul, but we'd keep jogging along, following their tracks, and run them to exhaustion.
#9
-
-
- 2,831 posts
Member

Posted 01 January 2015 - 07:00 PM
Metus regem, on 01 January 2015 - 08:29 AM, said:
Well a humanoid type leg should be better at weight, yet a reverse joint should be able to run faster.
Tell that to the Dasher...
#10
-

-
- Little Helper

- 2,030 posts
Member
Posted 01 January 2015 - 07:04 PM
Human legs are better for varied maneuvering. Rough terrain, climbing, side stepping, kicking, stomping/pressing (more direct load path, less energy lost in frame bending).
Reverse-joint legs are better for speed (sometimes), depending on the number of legs and type of gait.
Reverse-joint legs are better for speed (sometimes), depending on the number of legs and type of gait.
#11
-

-
- The Boombox

- 4,469 posts
Member
- LocationCleveland, Ohio
Posted 01 January 2015 - 07:12 PM
YueFei, on 01 January 2015 - 06:55 PM, said:
Don't diss human legs. We evolved into a rather impressive long distance runner, which is how our ancestors hunted (and how some humans still hunt today). We'd literally run our prey to death. They'd outrun us over the short haul, but we'd keep jogging along, following their tracks, and run them to exhaustion.
And better at climbing rough terrain. Lateral movement and transverse movement as well. Birds usually hop to turn...
Standing upright allowed better vision and better vocal communication over distance.
Human legs FTW!
#12
-

-
- The Raider

- 5,025 posts
Member
- LocationPittsburgh, PA
Posted 01 January 2015 - 07:15 PM
Shiroi Tsuki, on 01 January 2015 - 08:27 AM, said:
A little off topic, but related to Mechs.
Pros and Cons between Human joint legs and Chicken joint legs?
Basically, Catapult legs vs Atlas legs.
Pros and Cons between Human joint legs and Chicken joint legs?
Basically, Catapult legs vs Atlas legs.
It's mostly aesthetics, and the mistaken notion that reverse-joint legs would somehow inherit the advantages of digitigrade legs seen in nature (see ostriches) over plantigrade legs (see humans & human gait).
In practice, the reverse-joint 'Mechs (e.g. Catapult, Mad Cat, etc) are actually plantigrades (that is, they stand & walk on the foot rather than "on its toes").
In reality, the "classic" semi-crouching reverse-joint design (see old BT/MW art) is actually an unwise design choice from a robotics design standpoint; for it to actually work well, the weight bearing servos to be aligned such that the weight of the finished unit in a standing position is directed vertically through them (see here, here, and here).
Quote
Reverse knee is fine; it doesn't really matter which way the knee bends, it's mostly just aesthetics. What does matter is how the legs are aligned when weight is placed on them, and this is the problem that most people building 'reverse knee walkers' run into. Think about it, walking around with your knees bent is harder than walking with them mostly straight.
Mechwarrior and other mecha genres have polluted our minds with reverse knee walkers. Sure it looks pretty cool for them to have a huge angle in the knee bend, but it's far from efficient. The only bonus to it is that it lowers your COG. Ideally, you want all of your weight bearing servos to be aligned somewhat like this:

Mechwarrior and other mecha genres have polluted our minds with reverse knee walkers. Sure it looks pretty cool for them to have a huge angle in the knee bend, but it's far from efficient. The only bonus to it is that it lowers your COG. Ideally, you want all of your weight bearing servos to be aligned somewhat like this:
In other words: for the Mad Cat et al to actually work, they would necessarily have to have the more upright posture that PGI gave them in MWO (rather than the crouched stance often seen in classic BattleTech artwork), and all of the calls from some players to have the MWO reverse-joint 'Mechs be have a more crouched/squatting stance (which puts the joints & servos out of alignment) actually represents the "wrong" way to do it.

#13
-
-
- Philanthropist

- 640 posts
Member
- LocationWest Virginia

Posted 01 January 2015 - 07:18 PM
Are not chicken legs human legs turned backwards basically? So if you torso twist 180 and flop your arms you got it right.
#14
-
-
- FP Veteran - Beta 1
- 1,205 posts
Member
- LocationCosplaying Ruby from Rwby in Aiur, Auckland, GA America, Interior Union, Mar Sara and Remnant
Posted 01 January 2015 - 08:06 PM
Strum Wealh, on 01 January 2015 - 07:15 PM, said:
It's mostly aesthetics, and the mistaken notion that reverse-joint legs would somehow inherit the advantages of digitigrade legs seen in nature (see ostriches) over plantigrade legs (see humans & human gait).
In practice, the reverse-joint 'Mechs (e.g. Catapult, Mad Cat, etc) are actually plantigrades (that is, they stand & walk on the foot rather than "on its toes").
In reality, the "classic" semi-crouching reverse-joint design (see old BT/MW art) is actually an unwise design choice from a robotics design standpoint; for it to actually work well, the weight bearing servos to be aligned such that the weight of the finished unit in a standing position is directed vertically through them (see here, here, and here).
In other words: for the Mad Cat et al to actually work, they would necessarily have to have the more upright posture that PGI gave them in MWO (rather than the crouched stance often seen in classic BattleTech artwork), and all of the calls from some players to have the MWO reverse-joint 'Mechs be have a more crouched/squatting stance (which puts the joints & servos out of alignment) actually represents the "wrong" way to do it.
In practice, the reverse-joint 'Mechs (e.g. Catapult, Mad Cat, etc) are actually plantigrades (that is, they stand & walk on the foot rather than "on its toes").
In reality, the "classic" semi-crouching reverse-joint design (see old BT/MW art) is actually an unwise design choice from a robotics design standpoint; for it to actually work well, the weight bearing servos to be aligned such that the weight of the finished unit in a standing position is directed vertically through them (see here, here, and here).
In other words: for the Mad Cat et al to actually work, they would necessarily have to have the more upright posture that PGI gave them in MWO (rather than the crouched stance often seen in classic BattleTech artwork), and all of the calls from some players to have the MWO reverse-joint 'Mechs be have a more crouched/squatting stance (which puts the joints & servos out of alignment) actually represents the "wrong" way to do it.
Thankie~!
It seems like you know what you're talking about. What would be the ideal leg design for a Mech then? (Something as huge and heavy as a Shadowcat) I'm mainly look at low profile, and stability after one of the legs has stepped on an AT mine
#15
-
-
- The Raider
- 5,025 posts
Member
- LocationPittsburgh, PA
Posted 01 January 2015 - 09:32 PM
Shiroi Tsuki, on 01 January 2015 - 08:06 PM, said:
Thankie~!
It seems like you know what you're talking about. What would be the ideal leg design for a Mech then? (Something as huge and heavy as a Shadowcat) I'm mainly look at low profile, and stability after one of the legs has stepped on an AT mine
The post I quoted wasn't from me, but I understood enough of what the people in that thread were talking about to see that it related to this one.
Like that guy said, which way the knees bend doesn't really matter that much, but the important thing is how the loads are placed on the servos & the leg members - specifically, that the center-of-gravity ("CG") is (more-or-less) inline with the main load-bearing servos (that is, where the major joints - the hips, knees, and ankles are located).
One of the other guys on that thread - the one who was actually building the reverse-joint walker that spawned that discussion - came to the came conclusion.
Quote
I had the bot walking without the guns, but not 100% stable. After adding the guns, it wouldn't take more than 1-2 steps before falling over. My advise, don't bother with the Reverse Knee design unless you get into the high end dynamixel servos. 5990's have enough power to do a Reverse Knee, but, when you add all the extra weight, they don't perform very well.
(source)
(source)
Quote
The deal is, they're just too much stress on the servos.. it needs to stand more upright. Also, the torso on the scout was too far forward, the weight needs to be OVER the HIPS, not in front of them.. I used the battery as a counter weight, but, that still wasn't enough. I'm afraid the only way to do it would be stronger servos or, with a more normal walking gate and upright stance and get away from the crouching stance.
(source)
(source)
The conclusion from those discussions is that regardless of the knee direction, the biped has to be relatively straight-legged with the CG being (more-or-less) in-line with the hips (..."the weight needs to be OVER the HIPS, not in front of them"...) and knee joints when standing & walking, OR the leg actuators would need to be substantially overbuilt & overpowered (which makes its movements inefficient, makes the unit unnecessarily expensive, and would dramatically & unnecessarily force additional wear - and additional maintenance-related downtime - on the unit's legs) if the desired default position is more crouched/squatty.
This can also be seen in bipedal true digitigrades (such as ostriches, where what most people think is the reverse-joint knee is actually the ankle, anyway
) and bipedal plantigrades (such as humans).
In other words, 'Mechs that take the knees too far out-of-line (like the original Mad Cat and Vulture artwork, among others) or take the hips too far away from the CG (like the original King Crab and Stalker artwork) would barely be able to walk more than a few steps without falling over, much less be able to move at any significant speed.
#16
-
-
- Legendary Founder

- 9,886 posts
Member
- Facebook: Link
- LocationCanada
Posted 01 January 2015 - 09:55 PM
FupDup, on 01 January 2015 - 10:49 AM, said:
Most of the time, humanoid body mechs tend to have better hitboxes. There are of course exceptions like the Stalker, Doomcrow and Timbergod.
To be honest, the Stalker should have had human like legs, but were changed (for the better I believe) to the chicken walker we know in MW:O.
#17
-
-
- Little Helper
- 2,030 posts
Member
Posted 01 January 2015 - 09:59 PM
Shiroi Tsuki, on 01 January 2015 - 08:06 PM, said:
Thankie~!
It seems like you know what you're talking about. What would be the ideal leg design for a Mech then? (Something as huge and heavy as a Shadowcat) I'm mainly look at low profile, and stability after one of the legs has stepped on an AT mine
It seems like you know what you're talking about. What would be the ideal leg design for a Mech then? (Something as huge and heavy as a Shadowcat) I'm mainly look at low profile, and stability after one of the legs has stepped on an AT mine
Sturm posted the correct diagram to show that our battletech legs aren't quite the same as what appears in nature.
In reality, the optimum leg design for something like a shadowcat is probably tank treads. But, if we are going for reality, battlemechs in general are a terrible idea. Despite the special "ablative armor," a 120mm sabot round will punch through one of these things no problem, and there goes your billion dollar robot. I am guessing that future warfare will focus on smaller delivery systems in larger quantities with more powerful weapons (once stealth becomes negated by aerosolized network sensors that are so ubiquitous as to be a significant fraction of the air we breathe).
It's always easier to blow something up than to armor it against destruction.
#18
-
-
- The Messenger
- 4,560 posts
Member
- LocationCanada ᕙ(⇀‸↼‶)ᕗ
Posted 01 January 2015 - 10:01 PM
we're missing a joint in our chicken legs...
Makes me sad.
Makes me sad.
#19
-
-
- Ace Of Spades
- 26,888 posts
Member
- LocationThe Keeper of Memes
Posted 01 January 2015 - 10:04 PM
Davers, on 01 January 2015 - 09:55 PM, said:
To be honest, the Stalker should have had human like legs, but were changed (for the better I believe) to the chicken walker we know in MW:O.
The TRO art of the Stalker was pretty horrible.
Chicken legs look like 10000000000% better with that type of torso shape.
#20
-
-
- FP Veteran - Beta 1
- 1,205 posts
Member
- LocationCosplaying Ruby from Rwby in Aiur, Auckland, GA America, Interior Union, Mar Sara and Remnant
Posted 01 January 2015 - 10:12 PM
Dino Might, on 01 January 2015 - 09:59 PM, said:
Sturm posted the correct diagram to show that our battletech legs aren't quite the same as what appears in nature.
In reality, the optimum leg design for something like a shadowcat is probably tank treads. But, if we are going for reality, battlemechs in general are a terrible idea. Despite the special "ablative armor," a 120mm sabot round will punch through one of these things no problem, and there goes your billion dollar robot. I am guessing that future warfare will focus on smaller delivery systems in larger quantities with more powerful weapons (once stealth becomes negated by aerosolized network sensors that are so ubiquitous as to be a significant fraction of the air we breathe).
It's always easier to blow something up than to armor it against destruction.
Agreed. Mechs probably won't be the things we use to fight wars in the future. But I want to design one anyway!










1 user(s) are reading this topic
0 members, 1 guests, 0 anonymous users




